Manipulating Viewpoints Using the Robot | ||
| ||
Open a document with geometrical data.
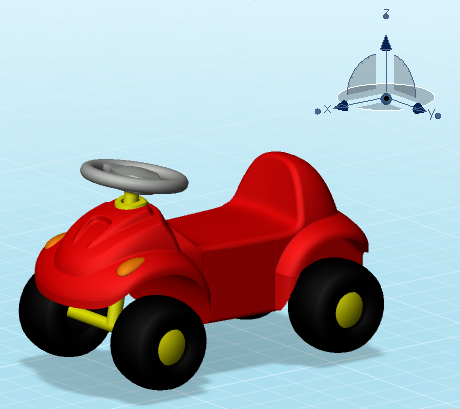
Rotate to see how the objects and the Robot are rotated together.
Drag any axis on the Robot.
The viewpoint is panned along the direction of the axis. For example, dragging one axis upwards pans up along the axis:
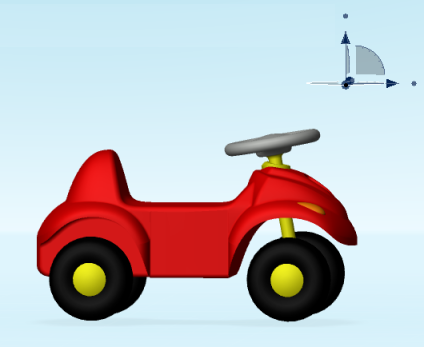
Drag an arc on the Robot.
For example, dragging an arc to the right rotates the objects in the plane subtended by the arc:

Dragging close to the blue ball rotates the objects quickly; dragging further away from the blue ball rotates more slowly. The rotation axis used is the same as that used when rotating using the other rotation tools.
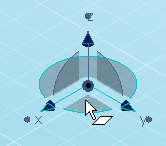
Drag a plane on the Robot.
For example, dragging the plane to the right moves the objects on the same plane:
Drag the circle to rotate to rotate the objects freely: